3.1. Mathematical properties of vectors
3.1.1. The symmetry transformations
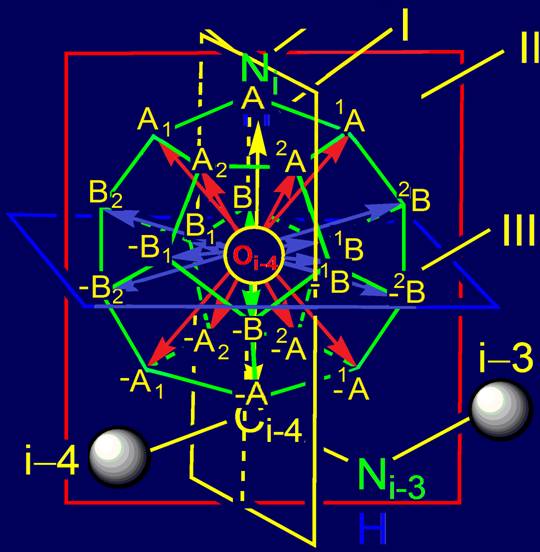
Vector, allocated in the field NiH…Oi-4=C-bond, as a result of dodecahedron introduction have appeared its radii which are starting from the centre in which Oi-4
atom is placed, and directed to its vertices (fig.
10). Owing to symmetry, the vectors in
opposite directions can be considered as well as the
diameters of the dodecahedron.
The
direction of each vector can be characterized by two points: a point from which the radius proceeds - the
dodecahedron centre (it is common for all 20 radii), and the point to which the radius is
directed, in this case, one of the vertices of the dodecahedron. The positions
of these vertices, in principle, can be described using any of the standard
methods for describing the coordinates (rectangular, polar, etc.), but for this
analysis is not essential. We used for this purpose letter
designations introduced in Section 2.3.2.
Inside the dodecahedron vectors form
four groups connected by mutual transformations of symmetry (Fig. 10).
|
|
|
Fig. 10. The system of transformations of vectors inside the dodecahedron. |
Since we have three planes of symmetry,
the transition through each plane to a symmetric element can be designated
by whatever letter. Following designations have been introduced
[1-5]:
–
The transition of element in itself is designated by digit 1.
– Transition through a plane I – the
letter a (alpha);
– Transition through a plane I I– letter b (beta);
– Rotation about an axis lying in the plane III – letter g (gamma).
All transformation
of vectors within
each group can be described in the form of table 3.1.
Table
3.1.
The groups of vectors connected by transformations
of symmetry
|
|
1 |
a |
b |
g |
ab |
ag |
bg |
abg |
|
Subgroup 1 |
А |
|
|
- А |
|
|
|
|
|
Subgroup 2 |
B |
|
|
- B |
|
|
|
|
|
Subgroup 3 |
A1 |
1A |
A2 |
-A1 |
2A |
-1A |
-A2 |
-2A |
|
Subgroup 4 |
B1 |
1B |
B2 |
-B1 |
2B |
-1B |
-B2 |
-2B |
The first and the second subgroups of vectors are
localized in the plane I. They are yellow and green
(Fig. 10), and the vertices to which
they are directed are designated
A and -A,
B and -B. These subgroups include,
respectively, two pairs of mutually perpendicular vectors related by the identity transformation (1) of the vector
in itself (A -> A, B -> B) and
rotation transformation g round axis C2 concerning a plane III: A -> – A and
B -> – B).
The third subgroup includes
eight vectors, stained
in Figure 10 in red and marked with the letters A with the indices. It is connected:
– The identity transformation (1) of the
vector in itself (A1
-> A1);
– Reflexion
transformations a - concerning a plane I (A1 -> 1A) and
b –concerning a plane II (A1-> A2);
– Their combination – ab (A1 -> 2A);
– Rotation transformation g round axis C2
concerning a plane III: A1
-> –A1;
– A
combination of rotation g with other transformations – ag: A1 -> –1A, bg: A1 -> – A2, abg: A1 -> –2A).
The fourth subgroup
includes eight vectors, stained
in Figure 10 in blue and marked with the letter B with indexes. It is connected by the same operations of
transformation of symmetry.
So, is available:
– The
identity transformation (1): B1 -> B1,
– Reflexion a: B1 -> 1B, reflexion b: B1
-> B2;
– Their combination ab: B1 -> 2B;
–Rotation g concerning a plane III g: B1
-> –B1;
– Various combinations of the rotation: ag: B1
-> –1B, bg: B1 -> –B2, abg: B1
-> –2B.
All these operations,
done for A1 and B1, can
be made for any of the vectors of
these two groups.
3.1.2. Vectors as a mathematical group
The group-theoretic approach has proved very effective in theoretical physics [16]. We
applied it to analyze the properties of MVM vectors.
Before making such an analysis,
we recall the basic axioms of group theory [16].
Group definition: Nonempty set G with the binary operation set on
it: G x G --> G is called as group (G) if following axioms are
executed in it:
1. Associativity: for any a, b
and c from G
it is true (a · b) · c = a · (b · c);
2. Presence of a neutral
element: in G there is an
element e such, that for all a from G it is fair e · a = a · e = a;
3. Presence of a inverse element: for any a from G there will be an element a-1
from G, named the inverse, such, that a · a-1
= a-1 · a = e:
Comparison of these axioms to the set of vectors of
a dodecahedron allows to say that is group.
The associativity of the vectors can be understood
in the sense that for any vectors in this group the result of their actions will always be the
same, if the sequence of their
action remains.
The presence of the neutral element presupposes
the existence of such a vector, the appearance
and effect of which does not change the
type of structure.
Finally,
the existence of inverse element presupposes
the existence of a vector, which realization fundamentally changes
the character of the
structure.
Examination of vectors from
the position of group-theoretic approach allows us to assume that the vector A, whose action is
always directed toward the formation of cyclic 4-unit fragment, is a neutral element, and the vector –A, whose action is
always directed to the destruction of 4-unit
fragment is the inverse element
in this group. A similar group-theoretic approach was used to analyze the
properties of the canonical set of amino acid side chains (Section
3.2.).
Address for connection: vector-machine@narod.ru